In diesem Artikel gibt es wieder ein Gast-Video von homofaciens.
Das Projekt homofaciens beschäftigt sich unter anderem mit dem Bau eines Open Source Elektroautos.
Der im Video verwendete Elektromotor ist das Modell des im Projekts zu realisierenden Elektroautos.
Im Video wird ein ein Schrittmotor zu einem elektronisch kommutierten Elektromotor umgebaut.
Zudem wird der Wirkungsgrad bestimmt. Dazu werden elektrische Eingangsleistung und mechanische Ausgangsleistung gemessen.
Die zum Bau des Elektromotors verwendeten Materialien sind möglichst einfach gehalten. Wer Lust hat, kann so den Motor nachbauen und eigene Experimente machen.
Die Funktionsweise des Motors wird durch einen selbstgebauten Drehzahlmesser, mit Hilfe digitaler Multimeter, LEDs und eines Oszilloskops veranschaulicht.
Die Steuerung erfolgt mit Hilfe eines Mikrocontrollers, des ATmega8A Microcontrollers der Firma Atmel. Die Funktionsweise der Software wird ebenfalls ausführlich besprochen.
Der Autor von homofaciens stellt seine Videos allen Interessierten kostenlos zur Verfügung.
Im folgenden findest Du eine Zeitleiste, mit der Du einzelne Szenen aus dem Video auch direkt auswählen kannst.
0:11
Ihr seht hier einen Schrittmotor mit einem Stator bestehend aus 12 Elektrospulen und je 4 Permanentmagneten an den beiden Rotorscheiben.
0:21
Die Elektrospulen können durch Transistoren einzeln angesteuert werden.
0:28
Die Kontrollfunktion übernimmt dabei ein Microcontroller der Firma Atmel, ein Atmega8a links unten auf der Platine.
0:36
Ich drehe den Motor ein wenig, damit ihr die vordere Rotorscheibe besser sehen könnt. die rot markierten Nordpole der Magnete zeigen in die Kamera, die Südpole entsprechend nach hinten.
0:50
Eine genaue Bauanleitung aller Komponenten inklusive der verwendeten Software, findet ihr auf der Projektseite.
1:02
Ich schließe die Platine nun an die Versorgungsspannung an, die von einem alten Computernetzteil bereitgestellt wird.
1:12
Wie zu sehen, werden die Elektrospulen nacheinander durchgeschaltet, wodurch der nächstgelegene der vier Permanentmagnete durch die jeweils aktivierte Spule angezogen wird.
1:23
Die Rotorscheibe folgt damit dem umlaufenden Magnetfeld.
1:27
Die Schaltdauer der Spulen kann mit Hilfe eines Potentiometers verkürzt werden, wodurch sich der Rotor schneller dreht.
1:37
Wie zu sehen, schwingt der Rotor immer ein wenig um seine jeweilige Position. Als Folge dieses Schwingens kann der Rotor dem umlaufenden Magnetfeld nicht mehr folgen, wenn die Schaltdauer einer einzelnen Spule zu kurz ist.
1:59
Der Rotor zittert nur noch hin und her.
2:03
Wird die Schaltzeit wieder verlängert, kann der Rotor dem umlaufenden Magnetfeld wieder folgen.
2:16
Da der Rotor insgesamt 4 Permanentmagnete besitzt, können auch bis zu vier Spulen gleichzeitig im Takt aktiviert werden. Damit wird das Drehmoment auf die Rotorscheibe erhöht.
2:43
Der Rotor schwingt heftiger um seine jeweilige Position. Wird nun die Schaltdauer verkürzt, gerät die Rotorscheibe früher aus dem Takt.
2:55
Mit einem Handgriff lässt sich die Schwingung der Rotorscheibe dämpfen.
3:05
Durch das Abbremsen an der Rotorwelle bewegt sich der Rotor auch bei kürzeren Schaltzeiten wieder im Uhrzeigersinn.
3:19
Per Druckschalter kann die Drehrichtung des Elektromotors geändert werden.
3:23
Ein kurzer Druck auf den Schalter reicht nicht aus, die Richtungsänderung auszulösen.
3:28
Dieser muss für mindestens eine Sekunde gedrückt werden.
3:35
Das Magnetfeld der Statorspulen läuft nun in die Gegenrichtung.
3:40
Das Licht der Dioden wandern von oben nach unten.
3:45
Auch in dieser Drehrichtung kann die Schaltdauer und die Anzahl der gleichzeitig aktivierten Spulen variiert werden.
4:19
Per Steckbrücke wird die Software des Microcontrollers angewiesen, in einen anderen Modus zu wechseln.
4:33
Wie zu sehen, werden nun nur noch drei der Spulen im Wechsel aktiviert, dennoch dreht sich der Rotor weiter im Uhrzeigersinn.
4:47
Per Potentiometer können weitere Dreiergruppen zugeschaltet werden, um das Drehmoment zu erhöhen.
4:56
Die softwareseitige Einteilung in derartige Dreiergruppen ermöglicht es, Spulen mit unterschiedlichen Eigenschaften im Stator zu verbauen und somit sehr flexibel je nach Betriebszustand anzusteuern.
5:18
Das funktioniert vorwärts wie rückwärts.
5:35
Wird die Steckbrücke in einer anderen Position aufgesteckt, so werden jetzt sechs Spulen – genau genommen zwei Dreiergruppen – zur Motorsteuerung verwendet.
6:37
Wie ihr seht, habe ich den Elektromotor umgebaut.
6:41
Die Rotorscheiben bestehen nun aus jeweils acht Permanentmagneten und die Südpole zeigen in die Kamera.
6:49
Die Elektrospulen des Stators üben in dieser Bauweise abstoßende Kräfte auf die Rotorscheibe aus.
6:57
An den roten Punkten auf dem Microcontroller könnt ihr erkennen, dass dieser ausgetauscht worden ist.
7:05
Die Steuersoftware muss für diese Rotorscheiben angepasst werden.
7:09
Ich schließe die Platine nun an die Versorgungsspannung an.
7:15
Wie ihr an den LEDs sehen könnt, werden die Transistoren nun nicht mehr direkt nacheinander durchgeschaltet, um den Rotor in Rotation zu versetzen.
7:30
Auf ihrem Weg nach oben springt das Lauflicht auch immer mal wieder nach unten.
7:44
Gleiches gilt für die Rotation entgegen dem Uhrzeigersinn.
7:55
Mehr zu diesem Steuerprinzip gibt's auf der Homepage zum Projekt.
8:08
Auch mit dieser Software genügen sechs beziehungsweise drei Spulen zur Rotorsteuerung.
8:20
Drehmoment und Schaltzeit können wie gewohnt variiert werden.
8:49
Richtig spannend wird's im nächsten Ausbauschritt des Motors, wozu die Steuersoftware erneut getaucht werden muss
9:04
Euch ist sicher schon die Metallscheibe aufgefallen, die sich auf dem Rotor befindet.
9:12
Diese wird mit Hilfe zweier Lichtschranken abgetastet, deren Schaltzustand ihr an den oberen zwei roten LEDs ablesen könnt.
9:21
Wenn ich die Scheibe mal ein wenig drehe, könnt ihr sehen, dass diese beiden LEDs zu blinken beginnen.
9:29
Die Steuersoftware erkennt mit dieser Sensorscheibe die aktuelle Rotorposition und schaltet entsprechend die Statorspulen.
9:41
Wie zuvor sind die Spulen in Dreiergruppen zusammengefasst und mit dem unteren Potentiometer können mehr oder weniger dieser Dreiergruppen aktiviert werden.
9:59
Damit ändert sich das Drehmoment und somit auch die Drehzahl des Motors.
10:15
Das Ganze funktioniert vorwärts wie rückwärts.
10:31
Eine weitere Sicherheitsfunktion besteht darin, dass die Drehrichtung nicht bei laufenden Motor geändert werden kann.
10:47
Erst bei stehendem Motor und einsekündiger Betätigung wechselt die Software die Drehrichtung.
11:07
Die Schaltzeit wird nun per Sensorscheibe gesteuert.
11:17
Das zweite Poti fungiert jetzt als Bremse.
11:31
Mit einer Steckbrücke kann die automatische Geschwindigkeitsregelung aktiviert werden.
11:50
Wird nun das Gaspedal auf Null zurückgenommen, behält der Motor seine Drehzahl bei.
11:57
Ihr könnt sehen, dass die Steuersoftware zeitweise eine weitere Dreiergruppe zur Regelung zuschaltet.
12:04
Wenn ich den Motor per Hand bremse – ich nehme besser die andere Seite – erhöht der Microcontroller automatisch das Drehmoment, um die Drehzahl konstant zu halten.
12:24
Beim Bremsen wird diese Regelung natürlich unterbrochen und der Motor kommt zum Stillstand
12:33
Die Sensorscheibe kann genutzt werden, um einen Drehzahlmesser zu realisieren.
12:40
Dieser besteht aus einem weiteren Microcontroller und 12 LEDs.
12:46
Eine Lichtschranke der Sensorscheibe fungiert als Signalgeber.
12:51
Damit können die Pulse gezählt und die entsprechende Drehzahl errechnet werden.
13:01
Die Anzeige erfolgt als Leuchtbalken, wobei pro LED 50 Umdrehungen pro Minute gerechnet werden müssen.
13:13
Die beiden roten LEDs rechts fungieren als Überlaufzähler.
13:22
Ist eine Drehzahl von 500 Umdrehungen pro Minute erreicht, zählen diese beiden LEDs im Binärsystem hoch und der Leuchtbalken startet wieder bei Null.
13:35
Es können also Drehzahlen bis 2000 Umdrehungen pro Minute erfasst werden.
13:49
Es folgt der Drehzahlmesser in Großansicht.
14:09
Mit Hilfe der Steckbrücke kann der Drehzahlmesser in einen anderen Anzeigemodus umgeschaltet werden.
14:21
Die Drehzahl wird jetzt in Form einer 12 bit Binärzahl ausgegeben.
14:29
Dabei ist links das niederwertigste Bit.
14:35
Somit können Drehzahlen bis 4095 Umdrehungen pro Minute angezeigt werden.
14:59
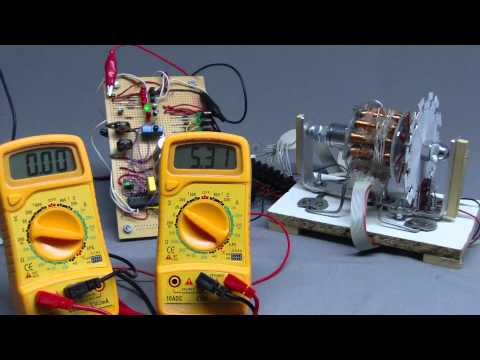
Kommen wir nun zur Messung der elektrischen Eingangsleistung.
15:04
Das rechte Multimeter zeigt die Eingangsspannung, das linke Multimeter den durch den Stator fließenden Strom.
15:13
Sobald ich Gas gebe, fließt ein Strom durch die Spulen und mit steigender Motordrehzahl verringert sich dieser wieder ein wenig.
15:24
An dem Minuszeichen seht ihr, dass ich das Multimeter falsch gepolt angeschlossen habe, das soll uns aber nicht weiter stören.
15:37
Mit jedem Gasschub steigt die Stromstärke, um mit steigender Motordrehzahl wieder leicht zu sinken.
16:06
Wenn ich den Motor per Hand abbremse, steigt der Stromfluss durch den Stator merklich an.
16:34
Beim Bremsen ist ebenfalls ein Anstieg des Motorstromes zu beobachten.
16:40
Das Vorzeichen wechselt dabei aber NICHT.
16:45
Der Bremsvorgang ist nicht rekuperativ, es wird also keine elektrische Energie aus der Bewegungsenergie des Motors gewonnen.
17:04
Ich schalte die Drehrichtung um und gebe erneut Gas.
17:13
Auch hier wechselt das Vorzeichen des Stromflusses nicht.
17:20
Die Drehrichtungsänderung wird nicht durch Umpolen der Statorspulen erreicht, sondern durch eine andere Aktivierungsreihenfolge.
17:33
Es folgt jetzt die Temperaturmessung an einem der Leistungstransistoren.
17:42
Sobald der Motor läuft, erwärmt sich der Transistor allmählich.
17:48
Das ist ein Anzeichen für auftretende Verluste.
17:54
Diese sind um so höher, je stärker der durch den Transistor fließende Strom ist.
18:03
Derartige Verluste sind so weit wie möglich zu verringern.
18:06
Ich blockiere den Motor um den Strom durch den Transistor auf seinen Maximalwert zu bringen.
18:15
Sofort steigt die Temperatur schneller an.
18:28
Zur Messung des Motordrehmoments dient diese Versuchsanordnung.
18:34
Eine Schnur ist um die Rotorachse gewickelt und an einem Ende an einem Gewicht befestigt.
18:42
Das Gewicht befindet sich auf einer Küchenwaage, womit die Zugkraft auf das Gewicht bestimmt werden kann.
18:54
Sobald sich der Motor dreht, wird das Gewicht angehoben und der entsprechende Wert kann abgelesen werden.
19:05
Sind Motordrehzahl, Durchmesser der Rotorwelle und die zugeführte elektrische Leistung bekannt, kann mit diesen Daten der Wirkungsgrad berechnet werden.
19:18
Eine Auswertung der Messwerte findet ihr auf der Projektseite.
19:28
Das dieser Elektromotor sehr flexibel angesteuert werden kann, haben wir ja bereits mehrfach gesehen.
19:36
Nun möchte ich euch eine weitere Möglichkeit zeigen, wie die Motorparameter softwaregesteuert geändert werden können.
19:46
Dazu dienen erneut die Steckbrücken.
19:50
Steckbrücke Nummer eins weist die Software an, den Zeitpunkt zu verstellen, an dem die Statorspulen umgeschaltet werden.
19:59
Wie ihr seht, steigt dadurch die Drehzahl an, obwohl nach wie vor nur drei der Spulen verwendet werden.
20:08
Wird die Funktion deaktiviert, fällt die Drehzahl wieder.
20:17
Steckbrücke Nummer zwei führt zu einer noch deutlicheren Drehzahlerhöhung.
20:24
Hier wird die Einschaltzeit vorverlegt, die Ausschaltzeit jedoch beibehalten.
20:36
Dadurch überlappen sich die Einschaltzeiten benachbarter Spulen.
20:56
Mit Hilfe der Verlegung der Steuerzeiten kann das Drehmoment den jeweiligen Betriebszuständen angepasst werden.
21:27
Die Vorverlegung der Schaltzeiten über Steckbrücke eins führt jedoch zu einem unerwünschten Nebeneffekt.
21:36
Der Motor läuft nicht mehr an, wenn die entsprechende Steckbrücke aktiviert ist.
21:48
Erst wenn die Steckbrücke herausgenommen wird, läuft der Motor an.
21:55
Wird die Brücke bei laufendem Motor aufgesteckt, tritt der erwünschte Effekt der Drehmomenterhöhung ein.
22:10
Die Variante mit den überlappenden Einschaltzeiten funktioniert auch beim Start des Motors.
22:48
Die Überlappung der Einschaltzeiten kann ich euch mit Hilfe eines Oszilloskops verdeutlichen.
22:57
Die Schaltzeiten zweier Spulen werden hiermit angezeigt.
23:03
Wie zu sehen, liegen die Schaltflanken dieser Spulen bei deaktivierter Steckbrücke direkt untereinander.
23:17
Wird die Steckbrücke aktiviert, so steigt die Drehzahl und die Schaltpulse werden kürzer.
23:30
Zu sehen ist außerdem, dass die Schaltflanken nun nicht mehr untereinander liegen, sondern versetzt sind.
23:44
Bei deaktivierter Brücke liegen diese Flanken wieder exakt untereinander.
24:10
Damit sind wir am Ende des Films angelangt, ich danke für eure Aufmerksamkeit.
Inhaltsverzeichnis:
00:11 Schrittmotor
01:27 Verkürzung der Schaltdauer
02:16 Gleichzeitige Aktivierung mehrerer Spulen
03:19 Drehrichtungsänderung
04:19 Steuermodi Schrittmotor
06:37 Rotation durch abstoßende Kräfte
09:04 Sensorscheibe
09:29 Elektronische Kommutation
11:07 Elektronische Bremse
11:31 Drehzahlregelung
12:33 Drehzahlmesser
14:59 Elektrische Eingangsleistung
17:33 Leistungsverlust am Transistor (Temperaturmessung)
18:28 Mechanische Ausgangsleistung
19:28 Softwaremodi kommutierter Motor
22:48 Oszillogramm Schaltzeiten