In diesem Artikel geht es um die Lösung der ersten Teilaufgabe für die Gesamtaufgabe zur Blindleistungskompensation eines Elektromotors.
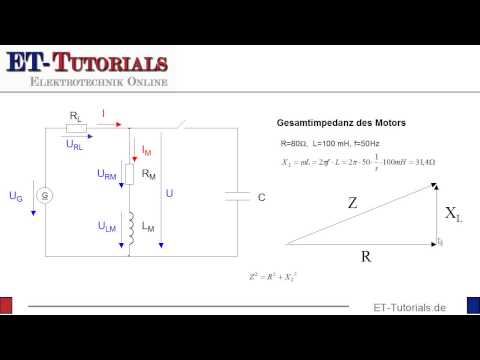
Es geht hier also zunächst um die Berechnung der Impedanz des Motors anhand eines Zeigerdiagramms
Im Zeigerdiagramm bilden der ohmsche Widerstand und die Induktivität des Motors ein rechtwinkeliges Dreieck. Da die Spannung an der Induktivität dem Strom um 90° voreilt und die Spannung am ohmschen Widerstand phasengleich zum Strom ist, muss auch die induktive Impedanz gegenüber dem ohmschen Widerstand einen Phasenwinkel von 90° haben.
Da sich so ein rechtwinkliges Dreieck bildet kann die Gesamtimpedanz Z also mit Hilfe des Satz des Pythagoras errechnet werden.
Der Winkel zwischen der Wirk und Scheinleistung ist der gleiche Winkel wie der zwischen ohmschen Anteil der Impedanz und der Gesamtimpedanz.
Der Leistungsfaktor cos φ, der das Verhältnis zwischen Wirk- und Scheinleistung angibt, kann also auch aus dem Verhältnis aus R und Z errechnet werden.
cos φ = P / S bzw. cos φ = R / Z.
In dem Video rechne ich die Zusammenhänge einmal vor.